In our previous post Application of Graph – Shortest Path Problems we discussed the findings of the optimal path or the shortest path between the nodes of a graph. We talk
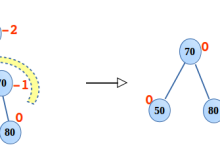
AVL tree is a self balancing binary search tree, where difference of right subtree and left subtree height to a node is at most 1. A self-balancing binary
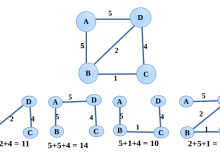
A subgraph T of a connected, undirected and weighted graph G(V, E) referred as Spanning Tree provided, Subgraph possesses all the vertices of the graph G(V, E) Subgraph
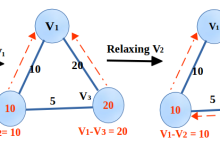
Determining the optimal path(such that the sum of weight of its constituent edges is minimum) between the nodes of a weighted graph is referred as Shortest Path Problems.
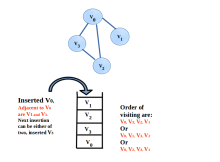
Visiting every vertices of a graph is referred as Graph Traversal, which is of two ways, Breadth First Traversing Depth First Traversing Most of the problems that we’ve
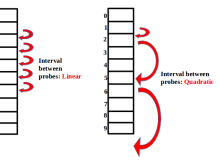
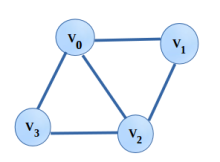
A graph can have several ways of representation, each one has their respective uses. However, the most commonly used are the Adjacency list and Adjacency Matrix. Read about graph –
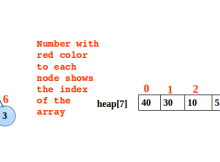
A heap is a tree based data structure that follows, It’s a complete tree , all the levels are completely filled except possibly the last level where all
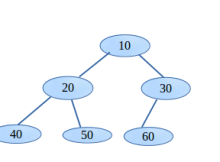
Binary search tree is a binary tree with following properties: Left sub tree of a node always contains lesser key Right subtree of a node always contains greater
Traversing a tree refers to visiting each node once. Interestingly, a tree has multiple ways of traversing the nodes, unlike linked list and array which have just one